GPU原理
学习目标
- 理解GPU的发展历史、三代演进及其与CPU的本质区别
- 掌握GPU的工作原理,包括并行计算基础、SIMD与SIMT的区别
- 深入理解GPU的线程结构:Grid、Block、Thread的层次关系
- 掌握GPU的内存架构:HBM、L2 Cache、L1 Cache、Register的层次及作用
- 理解Tensor Core的原理及其在混合精度训练中的应用
章节导言
GPU(图形处理器单元)是目前人工智能领域最重要的计算平台之一。从2012年AlexNet在ImageNet竞赛中取得突破性成果开始,GPU就在深度学习革命中扮演着核心角色。本章将深入探讨GPU的工作原理,帮助读者理解为什么GPU如此适合AI计算。
我们将首先回顾GPU的发展历史,了解从最初用于图形渲染的专用芯片,如何演变为今天通用并行计算的核心平台。然后,我们将详细分析GPU与CPU在架构上的本质差异,理解为什么GPU能够在并行计算任务中实现数量级的性能领先。
本章的重点是GPU的工作原理和线程结构。我们将探讨SIMD(单指令多数据)与SIMT(单指令多线程)这两种并行计算模式的区别,深入理解GPU如何通过大量线程超配来掩盖内存延迟,实现高吞吐量计算。
此外,GPU的内存架构是理解其性能优势的关键。我们将分析HBM高带宽内存、多级缓存结构以及寄存器文件的层次关系,理解数据在GPU中的流动方式。
最后,我们将介绍Tensor Core这一专门为深度学习矩阵运算设计的硬件单元,理解混合精度计算的原理和优势。
通过本章的学习,读者将建立起对GPU架构和计算模型的深入理解,为后续学习CUDA编程和NVIDIA架构奠定基础。
2.1 GPU发展历史
2.1.1 GPU的诞生与图形处理
GPU的诞生源于计算机图形学的需求。1980年代,随着个人计算机的普及,用户对图形显示的要求越来越高。传统的CPU需要同时处理操作系统、应用程序和各种计算任务,难以高效处理复杂的图形渲染工作。这催生了专门处理图形运算的芯片——GPU。
第一代GPU(1999年之前)
最早的GPU主要承担图形处理中的固定功能。1998年,NVIDIA推出了GeForce 256,这是业界首款被命名为"GPU"的图形处理芯片。第一代GPU的特点是:
- 固定功能流水线:只能执行预定义的图形处理任务
- 无可编程性:用户无法定制图形渲染算法
- 硬件加速:将部分图形运算从CPU转移到专用硬件
这一时期的GPU已经能够在硬件层面加速几何变换和光照计算,但整体功能相对有限。
第二代GPU(1999-2005年)
1999年,NVIDIA推出GeForce 256(正式命名为" world's first GPU"),将变换与光照(T&L)计算从CPU转移到GPU,实现了图形处理的重大突破。
这一时期的标志性事件包括:
- 1999年:NVIDIA GeForce 256,首次实现硬件T&L
- 2000年:GeForce 2,进一步提升性能
- 2001年:GeForce 3,引入可编程顶点着色器
- 2003年:NVIDIA GeForce FX,支持像素着色器编程
第二代GPU开始支持部分可编程性,开发者可以编写顶点着色器和像素着色器来定制图形渲染效果。
2.1.2 GPU的三代演进
GPU的发展可以划分为三个主要阶段,每一阶段都有标志性性的技术突破。
第一代:图形专用时代(1999-2006)
这一阶段GPU的核心特征是图形流水线的优化:
- 固定功能单元为主,少量可编程单元
- 严格服务于图形渲染任务
- 各厂商架构差异较大
2000年代初期,GPU主要被用于电脑游戏和图形工作站,专业应用领域有限。
第二代:通用计算萌芽(2006-2012)
2006年是GPU发展的重要分水岭。NVIDIA推出CUDA(Compute Unified Device Architecture)和GeForce 8系列GPU,首次将GPU从纯粹的图形处理器转变为通用并行计算设备。
这一阶段的标志性事件:
- 2006年:NVIDIA推出CUDA编程模型和GeForce 8800 GTX
- 2007年:CUDA正式发布,GPU计算开始普及
- 2008年:Apple推出OpenCL,开放GPU计算标准
GPU从"图形专用"走向"通用计算",开始被广泛应用于科学计算、物理仿真、信号处理等领域。
第三代:AI驱动爆发(2012至今)
2012年,AlexNet在ImageNet竞赛中以压倒性优势夺冠,深度学习时代正式开启。GPU凭借其并行计算能力,成为AI革命的算力核心。
这一阶段的标志性特征:
- 2012年:AlexNet使用GPU训练,深度学习突破
- 2016年:NVIDIA推出Pascal架构,引入NVLink
- 2017年:Volta架构引入Tensor Core
- 2020年:Ampere架构,Tensor Core 3.0
- 2022年:Hopper架构,HBM3内存
- 2024年:Blackwell架构,2080亿晶体管
2.1.3 GPU vs CPU:架构的本质差异
理解GPU与CPU的差异,是理解GPU为什么适合AI计算的关键。
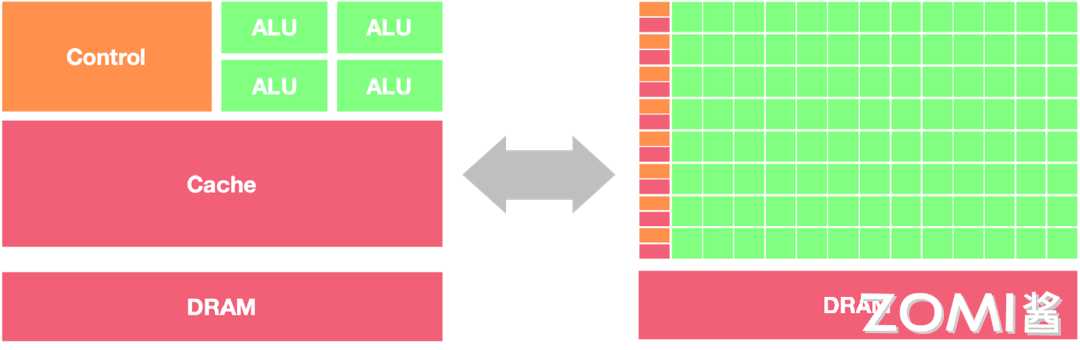
设计哲学的不同
CPU的设计目标是通用性和低延迟:
- 强大的ALU(算术逻辑单元),但数量有限
- 复杂的控制单元:分支预测、乱序执行
- 大容量缓存:降低内存访问延迟
- 适合串行任务和复杂逻辑
GPU的设计目标是高吞吐量:
- 海量简单ALU,专注并行计算
- 简化的控制逻辑:硬件资源最大化用于计算
- 高带宽内存:满足大数据量并行访问
- 适合大规模数据并行任务
用一句话概括:CPU是一位能干的博士,一次做一件事但做得很快;GPU是一群小学生,同时做大量简单的事。
架构对比
让我们通过一个形象的比喻来理解CPU和GPU的架构差异:
CPU就像一家精品餐厅:
- 只有少数几位大厨(ALU),但技艺高超
- 有经验丰富的领班(控制单元)协调厨房运作
- 有大型仓库(缓存)存储食材
- 适合做复杂的定制菜品(串行任务)
GPU就像一家快餐连锁店:
- 有成百上千位员工同时工作
- 每个员工只负责特定的简单任务
- 食材快速流转,不做长时间储存
- 适合大规模标准化生产(并行任务)
性能特征的差异
| 特性 | CPU | GPU |
|---|---|---|
| 核心数 | 4-128 | 数千-数万 |
| 线程数 | 数十 | 数万 |
| 缓存 | 大容量多级 | 小容量多级 |
| 主频 | 3-5 GHz | 1-2 GHz |
| 内存带宽 | 100-500 GB/s | 1000-3000 GB/s |
| 适用场景 | 复杂逻辑、低延迟 | 大规模并行、高吞吐 |
为什么GPU更适合AI计算?
深度学习,特别是神经网络,具有天然的并行特征:
- 神经元独立计算:神经网络中,每个神经元的计算相互独立
- 层内并行:同一层的所有神经元可以并行计算
- 批量并行:多个样本可以同时处理
- 矩阵运算:核心是大规模矩阵乘加运算
GPU的并行架构完美匹配这些特征。举例来说,一个拥有4096个神经元的层,在GPU上可以由数千个线程同时处理,每个线程计算一个或几个神经元的输出。
2.2 GPU工作原理
2.2.1 并行计算基础
并行计算的概念
并行计算是指同时使用多个计算资源(处理器或计算机)来解决一个问题。分为几种类型:
任务并行:不同处理器执行不同任务
处理器1 → 任务A
处理器2 → 任务B
处理器3 → 任务C
数据并行:不同处理器处理数据的不同部分
处理器1 → 数据A1, A2
处理器2 → 数据B1, B2
处理器3 → 数据C1, C2
深度学习主要涉及数据并行。例如,一个批量为1024的样本输入,每个样本可以分配给不同的计算单元同时处理。
并发与并行的区别
- 并发(Concurrency):系统能够处理多个任务,但不一定同时执行。操作系统通过时间片轮转等方式快速切换任务,给用户造成"同时执行"的错觉。
- 并行(Parallelism):真正同时执行多个任务。需要硬件支持,如多核CPU或多GPU系统。
对于GPU来说,其架构天然支持并行执行:
- 数千个计算核心可以真正同时工作
- 通过硬件调度器管理大量线程
- 线程切换开销极低(近乎零成本)
2.2.2 SIMD与SIMT
理解SIMD和SIMT是理解GPU编程模型的关键。
SIMD(Single Instruction, Multiple Data)单指令多数据
SIMD是一种数据并行技术。在同一时刻,对多个数据执行相同的指令。
传统方式(串行):
a[0] + b[0] → c[0]
a[1] + b[1] → c[1]
a[2] + b[2] → c[2]
a[3] + b[3] → c[3]
SIMD方式(并行):
[a[0],a[1],a[2],a[3]] + [b[0],b[1],b[2],b[3]] → [c[0],c[1],c[2],c[3]
一次指令执行,同时处理4个(或更多)数据元素。
SIMD的特点:
- 单线程执行,但数据级并行
- 需要硬件支持宽向量单元
- 数据必须对齐,类型一致
- 主要用于向量化计算加速
Intel的SSE/AVX指令集,ARM的NEON都是SIMD的实现。
SIMT(Single Instruction, Multiple Threads)单指令多线程
SIMT是NVIDIA在GPU上提出的并行执行模型,是SIMD的推广但更加灵活。
与SIMD的关键区别:
- SIMD要求所有数据严格对齐,同步执行
- SIMT允许线程独立执行,每个线程有自己寄存器
- 线程可独立分支,灵活寻址
SIMD:
Thread 0-31 执行相同指令,但只能访问连续对齐的内存
|_________|
|_________|
| ↓ | 同时执行
|_________|
|_________|
SIMT:
Thread 0-31 执行相同指令,但可访问任意内存地址
| Thread0 | → 数据A[0]
| Thread1 | → 数据G[7] (不同地址)
| Thread2 | → 数据K[12]
| ... |
| Thread31 | → 数据Z[99]
SIMT的优势
- 编程模型简单:开发者可以像写单线程程序一样写并行代码
- 灵活性高:每个线程可独立分支、寻址
- 硬件效率高:通过线程束(Warp)调度隐藏延迟
- 易于调试:可以像单线程程序一样设置断点
CUDA和OpenCL都采用SIMT执行模型。
2.2.3 GPU的并行计算原理
让我们通过一个具体例子来理解GPU的并行计算原理。
AX+Y向量运算
在深度学习中,\(Y = \alpha \times X + Y\)是一个常见的向量运算(称为SAXPY)。CPU和GPU处理这个运算的方式截然不同:
CPU串行执行:
for (int i = 0; i < N; i++) {
Y[i] = alpha * X[i] + Y[i];
}
一次处理一个元素,需要N次循环。
GPU并行执行:
__global__ void saxpy(float *X, float *Y, float alpha, int N) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
if (i < N) {
Y[i] = alpha * X[i] + Y[i];
}
}
数万个线程同时执行,每个线程处理一个或多个元素。
GPU如何实现高吞吐量?
GPU实现高吞吐量的关键是线程超配和流水线并行。
-
线程超配:GPU拥有远超过实际计算需要的线程数量。当部分线程等待内存访问时,其他线程可以立即开始计算。通过快速切换执行线程,GPU能够保持计算单元始终忙碌。
-
流水线并行:GPU的计算和内存访问是流水线的。多个线程的执行可以重叠,一个线程等待内存时,另一个线程在计算。
-
硬件调度:GPU内置的Warp调度器智能调度线程束,最大化硬件利用率。
2.2.4 内存带宽与计算强度
理解GPU性能,必须理解内存带宽和计算强度的概念。
内存带宽(Memory Bandwidth)
内存带宽是指单位时间内能够从内存传输的数据量,通常以GB/s为单位。
内存带宽 = 传输数据量 / 时间
= (时钟频率 × 位宽 × 传输效率) / 8 bytes/s
以NVIDIA A100为例:
- HBM2内存带宽:2,039 GB/s
- L2缓存带宽:4,000 GB/s
- L1缓存带宽:19,400 GB/s
计算强度(Compute Intensity)
计算强度是指执行计算所需的算术运算次数与数据传输次数的比值。
计算强度 = 算术运算量 / 数据传输量
对于矩阵乘法:
- 两个N×N矩阵相乘,需要\(2N^3 - N^2\)次运算
- 需要传输\(3N^2\)个数据元素
- 计算强度约为\(O(N)\)
屋顶线模型(Roofline Model)
屋顶线模型是评估GPU性能的理论框架:
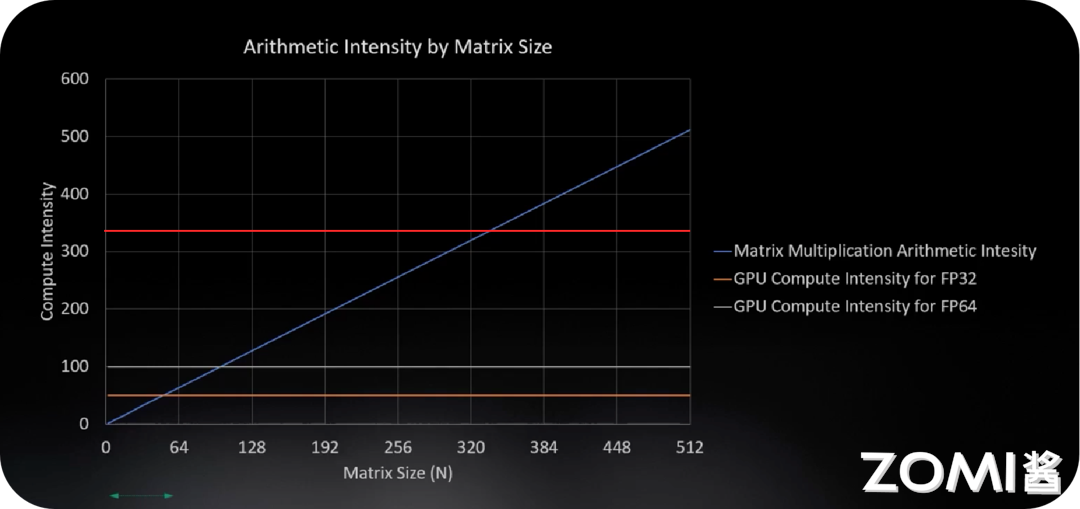
- 纵轴是计算性能(GFLOPS)
- 横轴是计算强度(算术强度)
- 屋顶线由内存带宽和峰值算力决定
当计算强度较低时,性能受限于内存带宽(内存_bound) 当计算强度较高时,性能受限于峰值算力(计算_bound)
深度学习的大部分操作处于内存带宽受限区域,因此优化内存访问模式至关重要。
2.3 GPU线程结构
2.3.1 CUDA编程模型概述
2006年,NVIDIA推出了CUDA(Compute Unified Device Architecture),这是专为GPU通用计算设计的编程平台和计算框架。
CUDA的核心设计思想:
- 主机-设备分离:CPU作为主机(Host),GPU作为设备(Device)
- 层次化线程:通过Grid、Block、Thread组织线程
- SIMT执行:每个线程执行相同程序,但处理不同数据
- 统一内存:简化CPU-GPU数据共享
CUDA编程的基本流程:
// 1. 分配GPU内存
cudaMalloc(&d_A, size);
cudaMalloc(&d_B, size);
cudaMalloc(&d_C, size);
// 2. 将数据从CPU拷贝到GPU
cudaMemcpy(d_A, h_A, size, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, size, cudaMemcpyHostToDevice);
// 3. 启动GPU内核
dim3 block(256);
dim3 grid((N + block.x - 1) / block.x);
kernel<<<grid, block>>>(d_A, d_B, d_C, N);
// 4. 将结果从GPU拷贝回CPU
cudaMemcpy(h_C, d_C, size, cudaMemcpyDeviceToHost);
// 5. 释放GPU内存
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
2.3.2 线程层次结构
CUDA的线程组织是层次化的,从高到低依次为:
Grid(网格)
- 整个GPU执行的所有线程组成一个Grid
- 所有线程共享全局内存
- Grid是最顶层的组织单位
Block(线程块)
- Grid由多个Block组成
- Block内的线程可以协作:
- 共享内存:同一Block的线程共享一块Shared Memory
- 同步:线程可以等待其他线程完成某操作
- Block在物理上对应一个SM(流式多处理器)
- Block一旦分配给SM,会一直保留到内核结束
Thread(线程)
- 最基本的执行单位
- 每个线程有唯一ID:threadIdx
- 线程可以访问:
- 私有寄存器
- 共享内存(同一Block内)
- 全局内存(所有线程)
Grid
├── Block 0
│ ├── Thread 0
│ ├── Thread 1
│ ├── ...
│ └── Thread 255
├── Block 1
│ ├── Thread 0
│ ├── Thread 1
│ ├── ...
│ └── Thread 255
└── Block N
├── ...
2.3.3 线程索引与数据映射
在CUDA中,通过线程索引来确定每个线程处理的数据。
一维索引
__global__ void kernel(float *data, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) {
data[idx] = idx * 2;
}
}
- blockDim.x:每个Block的线程数
- blockIdx.x:当前Block的索引
- threadIdx.x:线程在Block内的索引
二维索引
对于矩阵运算:
__global__ void matrixOp(float *A, float *B, float *C, int N) {
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < N && col < N) {
C[row * N + col] = A[row * N + col] + B[row * N + col];
}
}
// 调用
dim3 block(16, 16);
dim3 grid((N + block.x - 1) / block.x, (N + block.y - 1) / block.y);
matrixOp<<<grid, block>>>(A, B, C, N);
三维索引
CUDA也支持三维组织,对于3D数据处理很方便:
dim3 block(8, 8, 8); // 512线程/block
dim3 grid(16, 16, 16); // 16x16x16=4096 blocks
2.3.4 Warp调度机制
Warp的概念
Warp是SM(流式多处理器)的基本调度单位。每个Warp包含32个并行线程,这些线程执行相同的指令,但处理不同的数据。
为什么是32?
32是NVIDIA GPU的Warp大小设计,基于以下考虑:
- 硬件效率:32个线程的调度开销最小
- 内存合并:连续的32个线程访问连续内存地址
- 芯片面积:平衡并行度和硬件复杂度
Warp执行模式
SIMT的核心特征:
- Warp内所有线程锁步执行同一条指令
- 每个线程有自己的寄存器副本
- 线程可独立分支,但会导致执行效率下降
Warp执行示意:
时刻T0: [Thread0-31] → 执行 ADD指令
时刻T1: [Thread0-31] → 执行 MUL指令
时刻T2: [Thread0-31] → 执行 LOAD指令
分支分化(Branch Divergence)
当Warp内线程执行不同分支时,会发生分支分化:
if (threadIdx.x < 16) {
// Thread 0-15 执行这条路径
A = ...
} else {
// Thread 16-31 执行另一条路径
B = ...
}
此时GPU需要执行两次:
- Thread 0-15执行,16-31空转
- Thread 16-31执行,0-15空转
分支分化会降低GPU利用率,应尽量避免。
2.3.5 GPU的线程资源
GPU通过大量线程超配来掩盖内存延迟。
NVIDIA A100的线程资源:
| 资源 | 数量 |
|---|---|
| 总SM数 | 108 |
| 每SM最大线程数 | 2048 |
| 每SM最大Warp数 | 64 |
| 总线程数 | 221,184 |
| 总Warp数 | 6,912 |
活跃线程 vs 等待线程
- Active Warps:正在执行的Warp
- Waiting Warps:等待调度或等待内存访问的Warp
GPU设计理念:线程数量远大于硬件计算单元数量
当一个Warp等待内存访问时,调度器立即切换到另一个Warp执行计算。通过这种方式,GPU能够保持硬件持续忙碌,最大化吞吐量。
2.4 GPU内存架构
2.4.1 GPU内存层次概述
GPU的内存系统是层次化的,不同层级的带宽和延迟差异巨大。
NVIDIA A100内存层次:
┌─────────────────────────────────────────────────────┐
│ HBM (显存) │
│ 80 GB, 2,039 GB/s │
│ ┌───────────────────────────────────────────────┐ │
│ │ L2 Cache (40 MB) │ │
│ │ 4,000 GB/s │ │
│ │ ┌─────────────────────────────────────────┐ │ │
│ │ │ L1 Cache (192 KB/SM) │ │ │
│ │ │ 19,400 GB/s │ │ │
│ │ │ ┌───────────────────────────────────┐ │ │ │
│ │ │ │ Register File │ │ │ │
│ │ │ │ 256 KB/SM │ │ │ │
│ │ │ └───────────────────────────────────┘ │ │ │
│ │ └─────────────────────────────────────────┘ │ │
│ └───────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────┘
各层级对比:
| 层级 | 容量 | 带宽 | 延迟 | 范围 |
|---|---|---|---|---|
| HBM | 80 GB | 2 TB/s | ~400 ns | 全局 |
| L2 | 40 MB | 4 TB/s | ~150 ns | 全局 |
| L1 | 192 KB/SM | 19 TB/s | ~25 ns | SM私有 |
| Register | 256 KB/SM | 极高 | ~1 ns | 线程私有 |
2.4.2 HBM高带宽内存
HBM(High Bandwidth Memory)是GPU显存的主流技术。
HBM的技术原理
HBM通过3D堆叠技术,将多层DRAM芯片堆叠在一起,通过硅通孔(TSV)连接。
传统GDDR:
GPU芯片 ←→ PCB走线 ←→ GDDR芯片
↓
限制于IO引脚数
带宽受限
HBM:
GPU芯片
↑
│ TSV (硅通孔)
↓
DRAM芯片堆叠(4-8层)
↑
│ TSV
↓
DRAM芯片堆叠
HBM的优势
- 超高带宽:通过更多IO实现带宽突破
- 低功耗:驱动电压低,信号完整性好
- 小尺寸:3D堆叠节省面积
HBM发展历程:
| 型号 | 带宽 | 单芯片容量 |
|---|---|---|
| HBM | 128 GB/s | 8 Gb |
| HBM2 | 256 GB/s | 16 Gb |
| HBM2e | 461 GB/s | 16 Gb |
| HBM3 | 819 GB/s | 24 Gb |
| HBM3e | 1.2 TB/s | 32 Gb |
2.4.3 多级缓存结构
L2 Cache
L2缓存是GPU上所有SM共享的全局缓存:
- 容量:40 MB(A100)
- 作用:缓存全局内存访问,减少显存带宽压力
- 特性:保持一致性,支持原子操作
L1 Cache
L1缓存是每个SM私有的缓存:
- 容量:192 KB(A100)
- 组成:L1数据缓存 + 共享内存(共享存储可配置)
- 带宽:是HBM的10倍
共享内存(Shared Memory)
共享内存是用户可编程的高速存储:
__global__ void kernel(float *data) {
__shared__ float sharedData[256];
// 线程协作加载数据到共享内存
sharedData[threadIdx.x] = data[threadIdx.x];
__syncthreads();
// 使用共享内存进行计算
float sum = 0;
for (int i = 0; i < 256; i++) {
sum += sharedData[i];
}
}
共享内存的特点:
- 同一Block内线程共享
- 带宽极高,延迟极低
- 需要手动管理同步
2.4.4 寄存器文件
寄存器是GPU中最快的存储单位。
特性:
- 每SM有256 KB寄存器文件
- 每个线程访问私有寄存器
- 编译器分配,开发者无法直接控制
- 延迟约1个时钟周期
寄存器溢出
当线程需要的寄存器超过限制时,会溢出到L1缓存,性能显著下降。
// 编译报告示例
ptxas info : Registers used : 63
ptxas info : Local memory used : 0 bytes
ptxas info : Shared memory used : 0 bytes
// 如果寄存器超过限制(通常为255)
ptxas warning : Register spilling to local memory
2.4.5 内存访问模式优化
合并访问(Coalesced Access)
当GPU线程访问连续内存时,硬件可以合并为一次访问:
✓ 合并访问(好):
Thread 0 → 访问 addr+0
Thread 1 → 访问 addr+1
...
Thread 31 → 访问 addr+31
→ 一次内存事务完成
✗ 非合并访问(差):
Thread 0 → 访问 addr+0
Thread 1 → 访问 addr+100
...
Thread 31 → 访问 addr+3100
→ 32次内存事务!
矩阵加法的合并访问:
__global__ void coalescedAdd(float *A, float *B, float *C, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) {
C[idx] = A[idx] + B[idx]; // 合并访问
}
}
Bank冲突(Bank Conflict)
共享内存被组织为多个bank:
- 连续地址分布在不同bank
- 同时访问同一bank会串行化
无冲突(好):
Thread 0 → Bank 0
Thread 1 → Bank 1
Thread 2 → Bank 2
...
冲突(差):
Thread 0 → Bank 0
Thread 1 → Bank 0 ← 冲突!
Thread 2 → Bank 0 ← 冲突!
优化策略:错开线程访问的地址偏移。
2.5 Tensor Core
2.5.1 Tensor Core的诞生背景
在深度学习中,矩阵乘法(GEMM)是最核心的计算操作。ResNet-50等网络的计算量中,超过90%来自矩阵乘法。
传统CUDA Core的限制:
- 一个时钟周期只能执行一次FMA(乘加)
- 矩阵乘法需要多层循环实现
- 硬件利用率低
Tensor Core的革命:
2017年,NVIDIA在Volta架构中引入Tensor Core,专门加速矩阵运算。一个Tensor Core在一个时钟周期内执行4×4矩阵乘加:
其中A、B、C、D都是4×4矩阵。
2.5.2 Tensor Core工作原理
矩阵乘法并行本质
矩阵乘法可以分解为多个小矩阵的乘加操作:
C = A × B
┌─────────┐ ┌─────────┐
│ A │ │ B │
│ (M×K) │ × │ (K×N) │
└─────────┘ └─────────┘
↓ ↓
┌─────────────────────────┐
│ C = A×B │
│ (M×N) │
└─────────────────────────┘
Tensor Core将大矩阵分割为4×4子矩阵:
┌─────────────────────────────────────┐
│ A(M×K) B(K×N) │
│ ┌───┬───┐ ┌───┬───┐ │
│ │A11│A12│ │B11│B12│ │
│ ├───┼───┤ × ├───┼───┤ │
│ │A21│A22│ │B21│B22│ │
│ └───┴───┘ └───┴───┘ │
│ │
│ C(M×N) = Σ Aik × Bkj │
│ 每个Cij是A的第i行与B的第j列点积 │
└─────────────────────────────────────┘
Tensor Core执行过程:
Tensor Core在一个时钟周期内完成:
┌─────────────────────────────────────────┐
│ 1. 接收 A的一行4个FP16元素 │
│ 2. 接收 B的一列4个FP16元素 │
│ 3. 执行 4×4 乘加运算 │
│ 4. 输出 D的一个FP16/FP32元素 │
└─────────────────────────────────────────┘
混合精度计算
Tensor Core支持混合精度(FP16输入,FP32累加):
# PyTorch中使用Tensor Core
with torch.cuda.amp.autocast():
output = torch.matmul(A, B) # 自动使用Tensor Core
- 输入:A, B → FP16(加速)
- 累加:C, D → FP32(精度)
- 充分利用Tensor Core性能,同时保持训练精度
2.5.3 各代Tensor Core演进
Volta Tensor Core (第一代)
- 架构:V100
- 支持精度:FP16
- 每SM 8个Tensor Core
Turing Tensor Core (第二代)
- 架构:T4, RTX 20系列
- 新增精度:INT8, INT4, INT1
- 用于推理加速
Ampere Tensor Core (第三代)
- 架构:A100, RTX 30系列
- 新增精度:TF32, BF16
- 结构稀疏支持
- 每SM 4个Tensor Core
| 精度 | 计算性能提升(vs FP32 CUDA Core) |
|---|---|
| FP64 | 1x(基准) |
| TF32 | 8x |
| BF16 | 16x |
| FP16 | 32x |
| INT8 | 64x |
| INT4 | 128x |
Hopper Tensor Core (第四代)
- 架构:H100
- 新增精度:FP8
- Transformer Engine 2.0 -动态范围自适应精度
2.5.4 混合精度训练
混合精度训练是利用Tensor Core加速深度学习的关键技术。
为什么需要混合精度?
- 内存节省:FP16只占FP32一半内存
- 带宽提升:相同带宽传输更多数据
- 计算加速:Tensor Core专为FP16优化
- 精度保持:FP32累加避免精度损失
混合精度训练三要素:
- FP16主权重:模型权重以FP16存储
- FP32优化器状态:Adam等优化器状态保持FP32
- Loss Scaling:放大loss避免下溢
PyTorch实现:
# 1. 创建GradScaler
scaler = torch.cuda.amp.GradScaler()
# 2. 训练循环
for data, target in dataloader:
optimizer.zero_grad()
# 自动混合精度
with torch.cuda.amp.autocast():
output = model(data)
loss = loss_fn(output, target)
# 缩放loss,反向传播
scaler.scale(loss).backward()
# 更新权重
scaler.step(optimizer)
scaler.update()
2.5.5 结构稀疏性
结构稀疏性是提升AI芯片计算效率的重要技术。
稀疏矩阵
神经网络中存在大量冗余权重:
- 训练后的权重接近零
- 可以剪枝(pruning)移除
- 稀疏矩阵运算量更少
结构稀疏(2:4稀疏)
NVIDIA在A100引入2:4结构稀疏:
每4个元素中,恰好2个为0
[1, 0, 3, 0, 5, 6, 0, 0, ...] ✓ 有效
[1, 0, 3, 5, 0, 6, 0, 0, ...] ✗ 无效
稀疏Tensor Core加速
- 压缩稀疏矩阵(移除零值)
- Tensor Core直接使用压缩格式计算
- 理论加速2倍
# PyTorch结构稀疏支持
import torch.nn.utils.prune as prune
# 应用2:4结构稀疏
prune.l1_unstructured(model, name='weight', amount=0.5)
本章小结
本章我们深入学习了GPU的工作原理:
- GPU发展历史:
- 从图形专用到通用计算
- 2012年后成为AI计算核心平台
-
与CPU的设计哲学完全不同
-
GPU工作原理:
- SIMD vs SIMT:SIMT更灵活,支持线程独立执行
- 并行计算基础:数据并行是深度学习的主要并行模式
-
线程超配:大量线程掩盖内存延迟
-
GPU线程结构:
- Grid > Block > Thread的层次关系
- Warp是SM的基本调度单位(32线程)
-
线程索引与数据的映射关系
-
GPU内存架构:
- HBM高带宽显存
- 多级缓存:L2 > L1 > Register
- 共享内存可编程控制
-
合并访问优化
-
Tensor Core:
- 专门加速矩阵乘法的硬件单元
- 混合精度训练:FP16计算 + FP32累加
- 各代演进支持更多精度
理解这些核心概念,为后续学习NVIDIA具体架构和CUDA编程奠定了坚实基础。
思考与练习
-
架构对比:解释CPU和GPU在设计哲学上的本质差异。为什么GPU比CPU更适合执行深度学习工作负载?
-
SIMT理解:什么是SIMT(单指令多线程)?它与SIMD(单指令多数据)的主要区别是什么?SIMT的灵活性体现在哪些方面?
-
线程层次:解释CUDA中Grid、Block、Thread的层次关系,以及如何通过线程索引确定每个线程处理的数据。
-
内存带宽:GPU的多级内存架构是如何组织的?什么是合并访问?为什么合并访问对GPU性能很重要?
-
Tensor Core:Tensor Core是如何加速矩阵运算的?什么是混合精度训练?它为什么能兼顾性能和精度?
-
性能优化思考:如果一个深度学习模型的计算强度较低(内存受限),可以采用哪些策略来提升GPU计算效率?